Al via a Venezia i test sui pesci robot che comunicano tra loro
Il progetto EU-FET subCULTron è finanziato dall'Unione Europea. I pesci meccanici potranno raccogliere dati relativi all'habitat subacqueo anche per lunghi periodi di tempo
Pesci robot stanno nuotando in questi 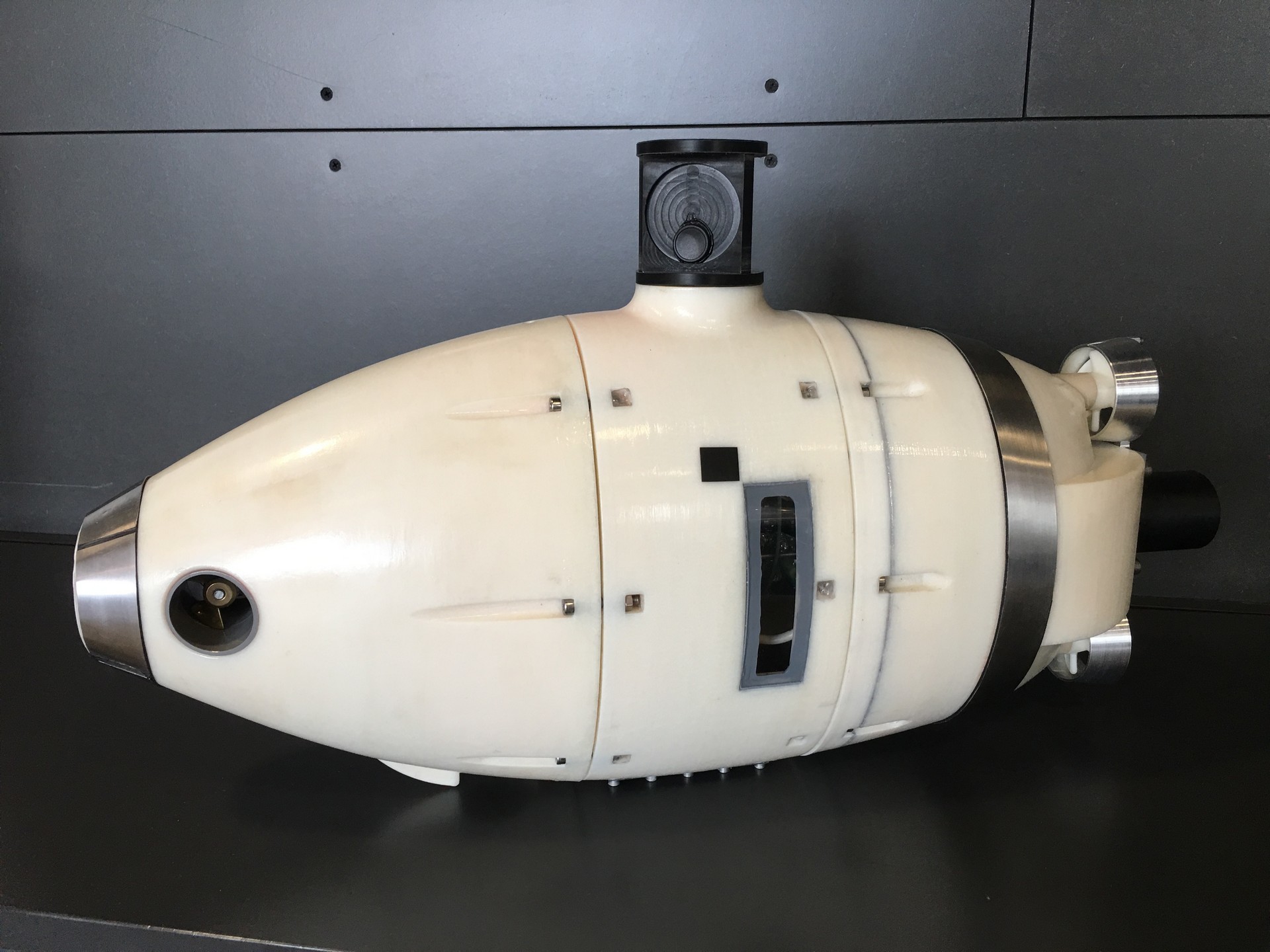 giorni nella darsena grande dell'Arsenale di Venezia. E' scattata la fase operativa del progetto per il test di questi dispositivi subacquei, che punta a sviluppare e realizzare 120 pesci/robot interconnessi tra di loro.
giorni nella darsena grande dell'Arsenale di Venezia. E' scattata la fase operativa del progetto per il test di questi dispositivi subacquei, che punta a sviluppare e realizzare 120 pesci/robot interconnessi tra di loro.
Si tratta di un'applicazione innovativa dell'intelligenza artificiale, che porta ognuno di loro ad agire come fosse in un vero e proprio banco di pesci in natura. Il progetto si chiama EU-FET subCULTron, è finanziato dall'Unione Europea (Horizon2020) e vede il coinvolgimento degli scienziati di 6 nazioni, con la partnership italiana formata da ISMAR-CNR, CORILA e dalla Scuola Superiore Sant'Anna.
Gli scienziati del consorzio, coordinati da Thomas Schmickl dell'Università di Graz, sono stati in grado di creare un sistema di robot che recepisce i cambiamenti dell'ambiente in cui si trova, adattandovisi e raccogliendo i dati relativi all'habitat subacqueo, anche per lunghi periodi di tempo.
Tre le tipologie di robot realizzati: "aMussel" (mitili artificiali), cilindri della lunghezza di 50 cm e del peso di circa 2 kg, che rappresentano la memoria collettiva a lungo termine del sistema permettendo la memorizzazione dei dati; "aFish" (pesci robot), ovvero pesci "intelligenti" che hanno il compito di monitorare ed esplorare l'ambiente marino dando input dall'operatore e comunicando con le altre tipologie di robot. I pesci robot si muovono autonomamente in acqua, come un vero e proprio banco di pesci. Ognuno di loro, individualmente, raccoglie dati che comunica al gruppo, innescando un comportamento collettivo dell'intero banco. Infine "aPad" (ninfee artificiali), che costituiscono la piattaforma di appoggio per le due tipologie precedenti di robot acquatici: li trasportano in una posizione definita da coordinate GPS, rimanendo in contatto con le reti satellitari e di telefonia mobile. Accumulano energia mediante i pannelli di cui sono rivestiti e grazie a questa energia ricaricano gli aMussel e gli aFish.